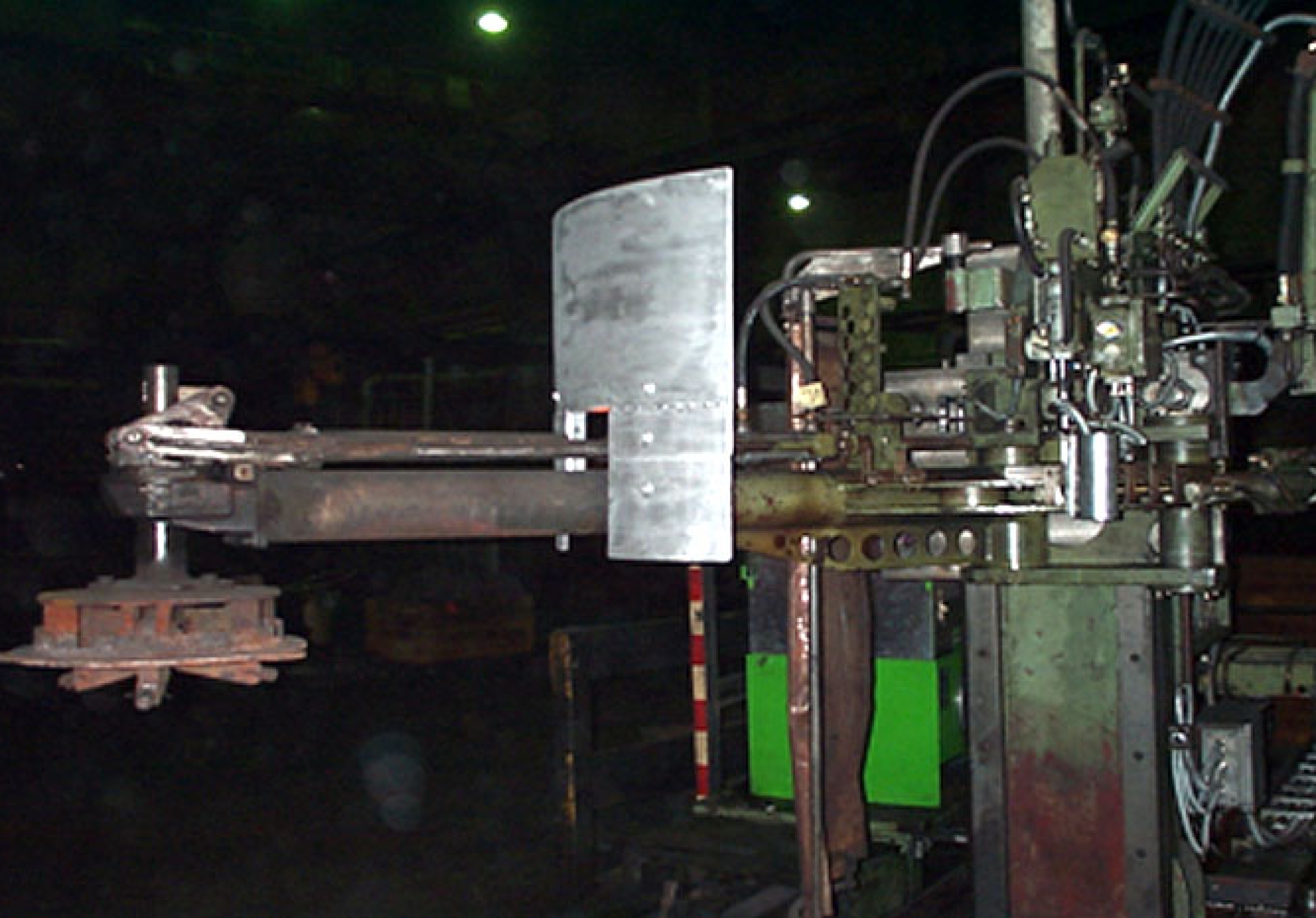
Im vorliegenden Fall wurde ein Stapelroboter automatisiert, der in einer Schmiede im Einsatz ist.
Die heissen Schmiedeteile werden aus dem Ofen kommend zum Weitertransport auf Paletten umgesetzt. Für die Steuerung wurde eine Siemens Simatic S7 verwendet. Ein Teil der Sensoren und Steuerventile am Roboterarm sind über dezentrale Beckhoff-Module per Profibus-DP mit der SPS vernetzt. Damit ist eine optimale Steuerung des Roboters gewährleistet. Zusätzlich wird über die Steuerung auch die Palettenzuführung überwacht und gesteuert. Die Bedienung, Anzeige der Variablenzustände und Fehlermeldungen erfolgen über ein Siemens OP17.
AntHALmatic
Ingenieurgesellschaft bR
Kaolinstraße 16
D - 06126 Halle / Saale
Tel. +49-177-5175125
(nur WhatsApp)
weiss@antrima.com
Antrima GmbH
vul. Hlybochytska 13, sec.1
Office 1
UA-04052 Kiew
Tel. +380 50 386 7735
fomenkov@antrima.com
ANTRIMATIC Ltda.
Av. Nossa Senhora da Copacabana 435 sala 909
Rio de Janeiro
Brasilien, CEP 22020-002
Tel. +55 19 974133137
edna.marques@antrimatic.com
Folgen Sie uns: